
Object Capture for a Manipulator Subject to Floating-Base Disturbances
Last updated on July 2024.
Introduction
This project was a research project I participated in at CUHK-Shenzhen, supervised by Prof. QIAN Huihuan, 2022 ~ 2023. In this project, I assisted a Ph.D. student (now Dr. XU Ruoyu) in proposing and implementing a motion planning algorithm that allows a floating-base manipulator to capture objects under the disturbance of base motion.
Relevant publication
For more technical details, please see our publication:
R. Xu, Z. Jiang, B. Liu, Y. Wang, and H. Qian, “Confidence-Aware Object Capture for a Manipulator Subject to Floating-Base Disturbances,” in IEEE Transactions on Robotics (T-RO), vol. 40, pp.4396-4413, doi: 10.1109/TRO.2024.3463476.
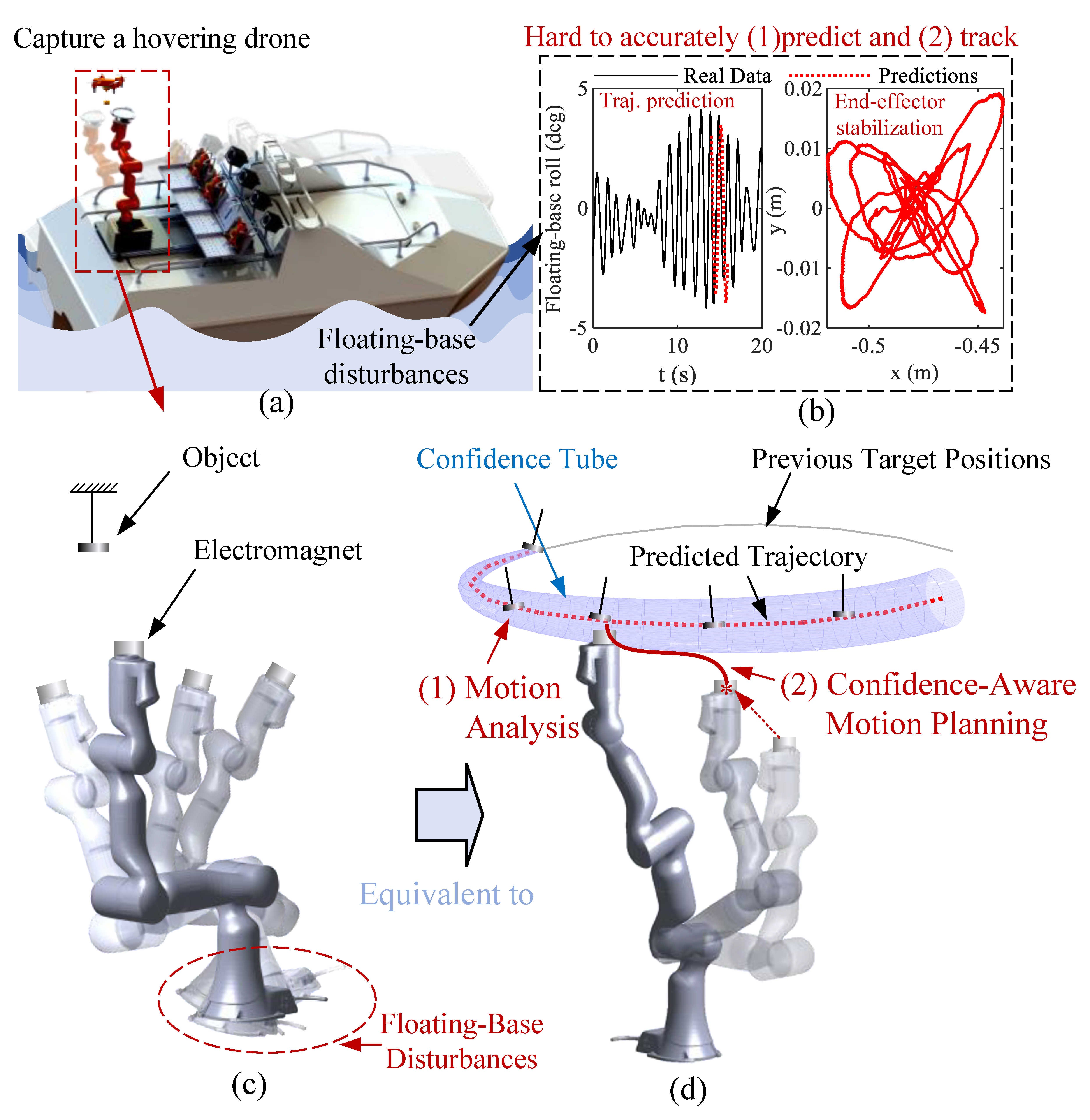
Manipulator-assisted UAV landing on USV subject to wave disturbances
As illustrated in the figure above, this project originated from the need to use manipulators to assist UAVs in landing on USVs disturbed by waves. This is a beneficial feature for marine USV-UAV systems, especially when encountering bad weather and high see states.
For more information about the USV-UAV system developed by our lab, you may refer to
R. Xu, C. Liu, Z. Cao, Y. Wang, and H. Qian, “A manipulator-assisted multiple UAV landing system for USV subject to disturbance”, Ocean Engineering, vol. 299 (2024) 117306, doi: 10.1016/j.oceaneng.2024.117306.
For more information about the end effector used in this project, please see our tethered landing system project.