
Bio-Inspired Ornithopter for Aquatic-Aerial Hybrid Locomotion
Last updated on March 2023.
Introduction
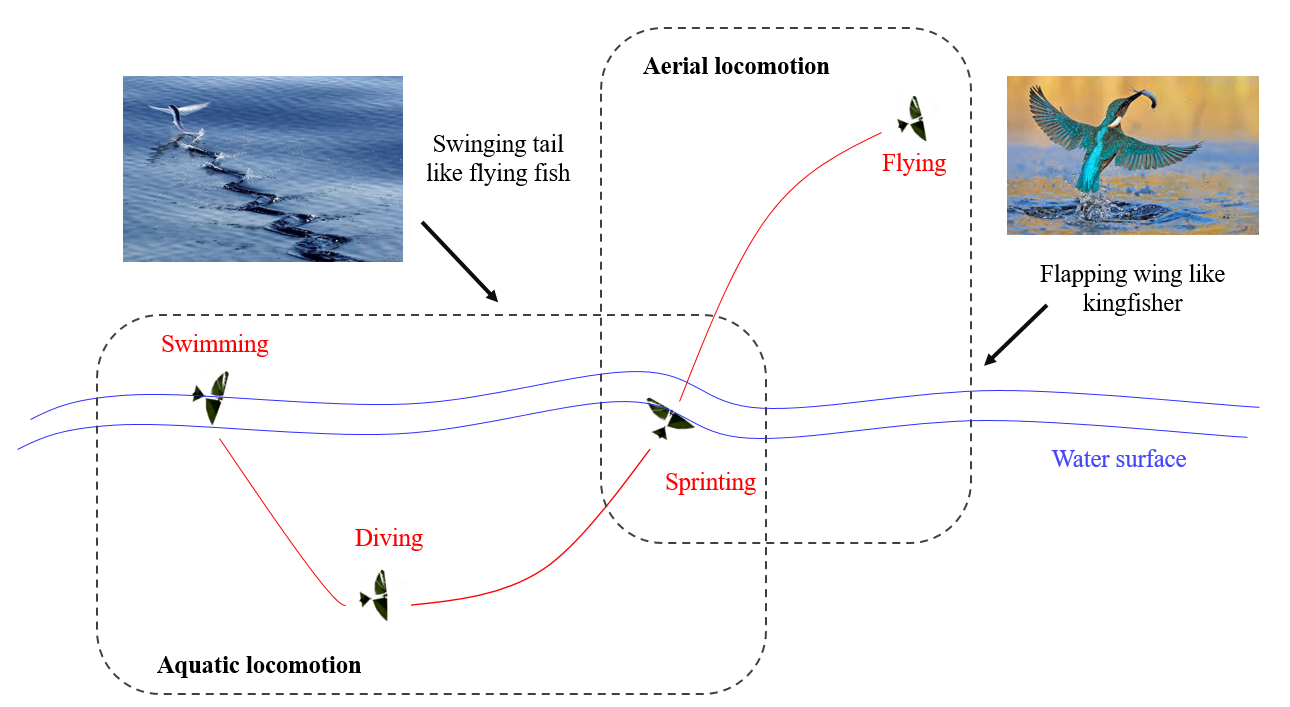
This project was my toy project supported by CUHK-Shenzhen Undergraduate Research Award, 2021 ~ 2022. Inspired by the flying fish and the kingfisher, this project aimed to build a ornithopter that can perform aquatic (swimming) and aerial (flying) hybrid locomotion.
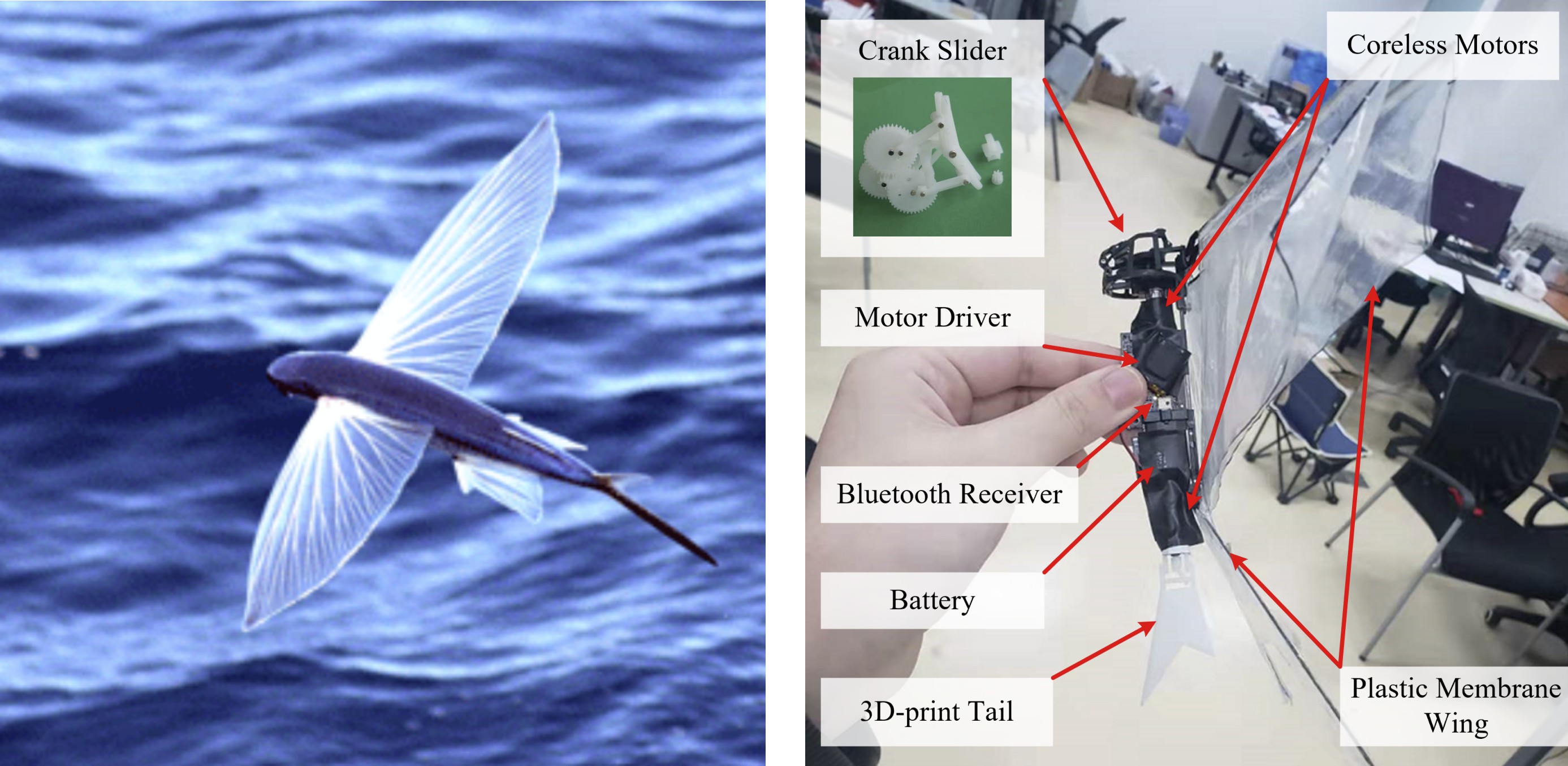
The picture below is the prototype I made. The robot was equipped with a pair of wings that could flap up and down, and a tail that could move left and right. The robot was driven by two micro-coreless motors, powered by an onboard battery and remotely controlled via bluetooth.
Demos
Although I was unable to achieve the desired seemingly hybrid locomotion due to weight constraints, motor performance and waterproofing, my prototype successfully achieved independent (however, uncontrollable) aquatic and aerial locomotion. Here are some videos of the ornithopter in action: