
Tethered Landing System for UAVs on Small and Disturbed Platforms
Last updated on May 2024.
Introduction
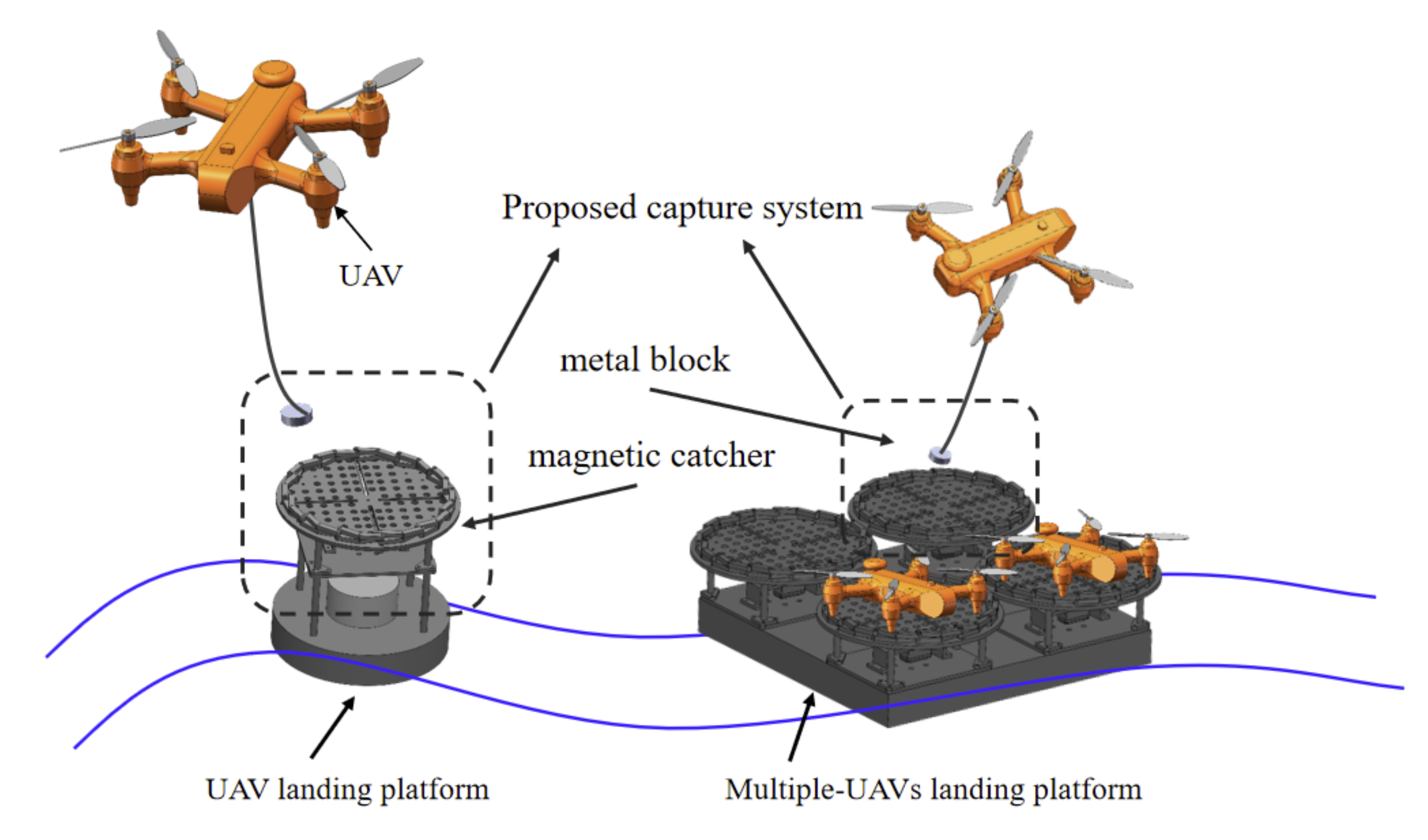
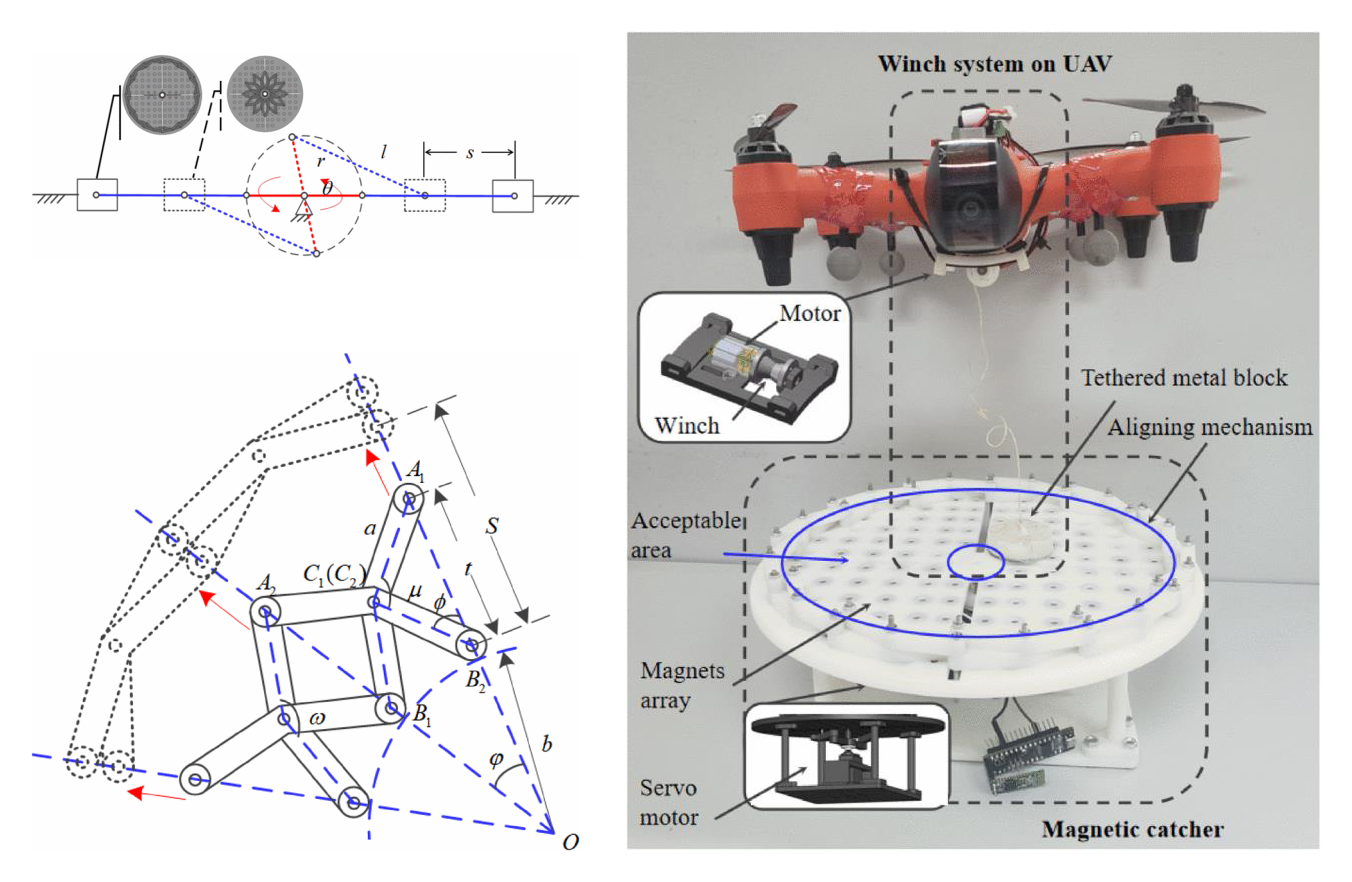
This project was a research project I participated in at CUHK-Shenzhen, supervised by Prof. QIAN Huihuan, 2020 ~ 2021. Inspired by kites (no matter how the wind blows, as long as you can reel in the rope, the kite will eventually return to your hands), I assisted a Ph.D. student (Mr. LIU Chongfeng) in proposing and implementing a tethered landing system that makes UAVs capable of landing on small and disturbed platforms.
Relevant publication
For more technical details, please see our publication:
C. Liu, Z. Jiang, R. Xu, X. Ji, L. Zhang, and H. Qian, “Design and Optimization of a Magnetic Catch System for Precise UAV Landing on Disturbed Aquatic Surface Platform,” 2022 IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 2022, pp. 1162-1168, doi: 10.1109/ICRA46639.2022.9812270.
Follow up
An improved version was used as the end effector in our lab’s manipulator-assisted UAV landing project.
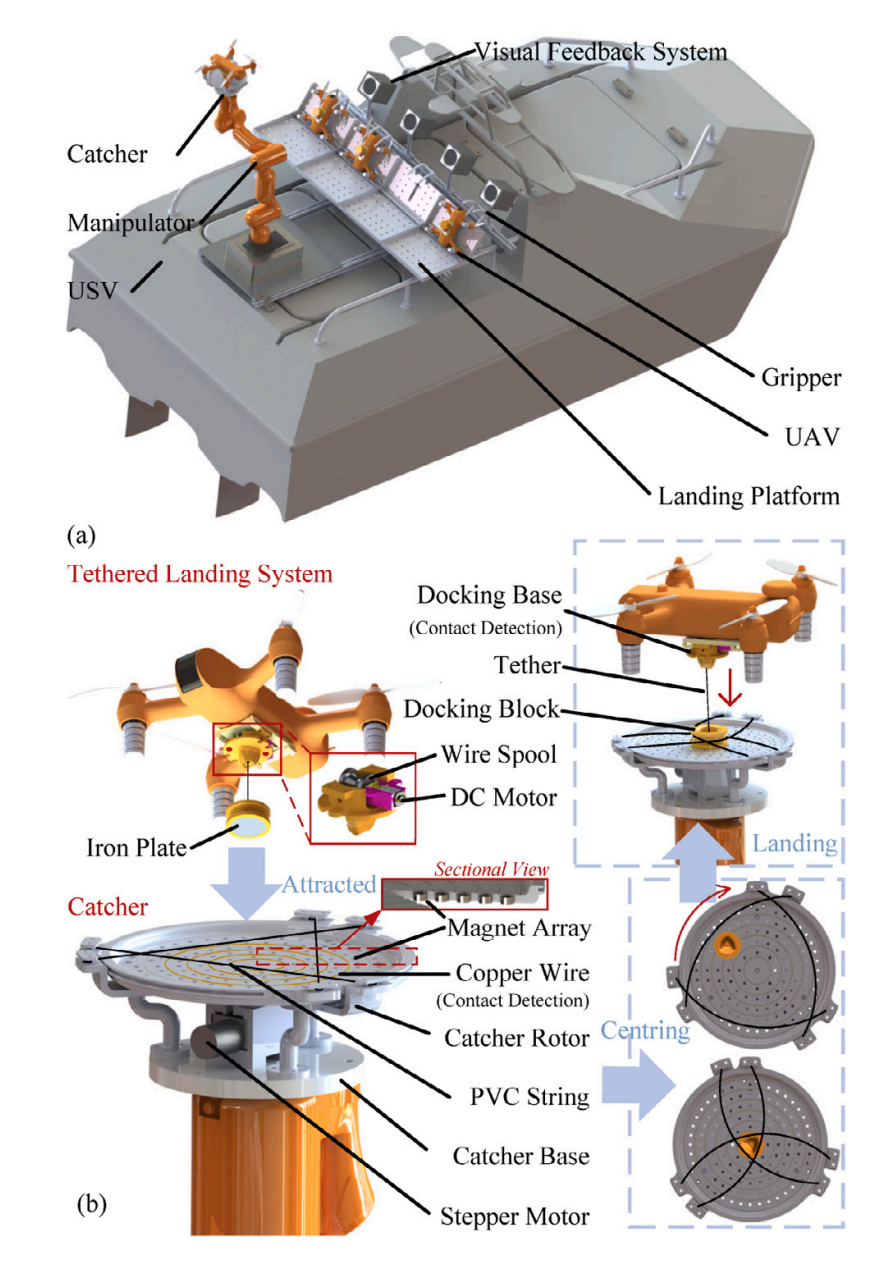
For more information about the USV-UAV system developed by our lab, you may refer to
R. Xu, C. Liu, Z. Cao, Y. Wang, and H. Qian, “A manipulator-assisted multiple UAV landing system for USV subject to disturbance”, Ocean Engineering, vol. 299 (2024) 117306, doi: 10.1016/j.oceaneng.2024.117306.
