
Mobile Robot Navigation Using Vision and LiDAR
Last updated on April 2022.
Introduction
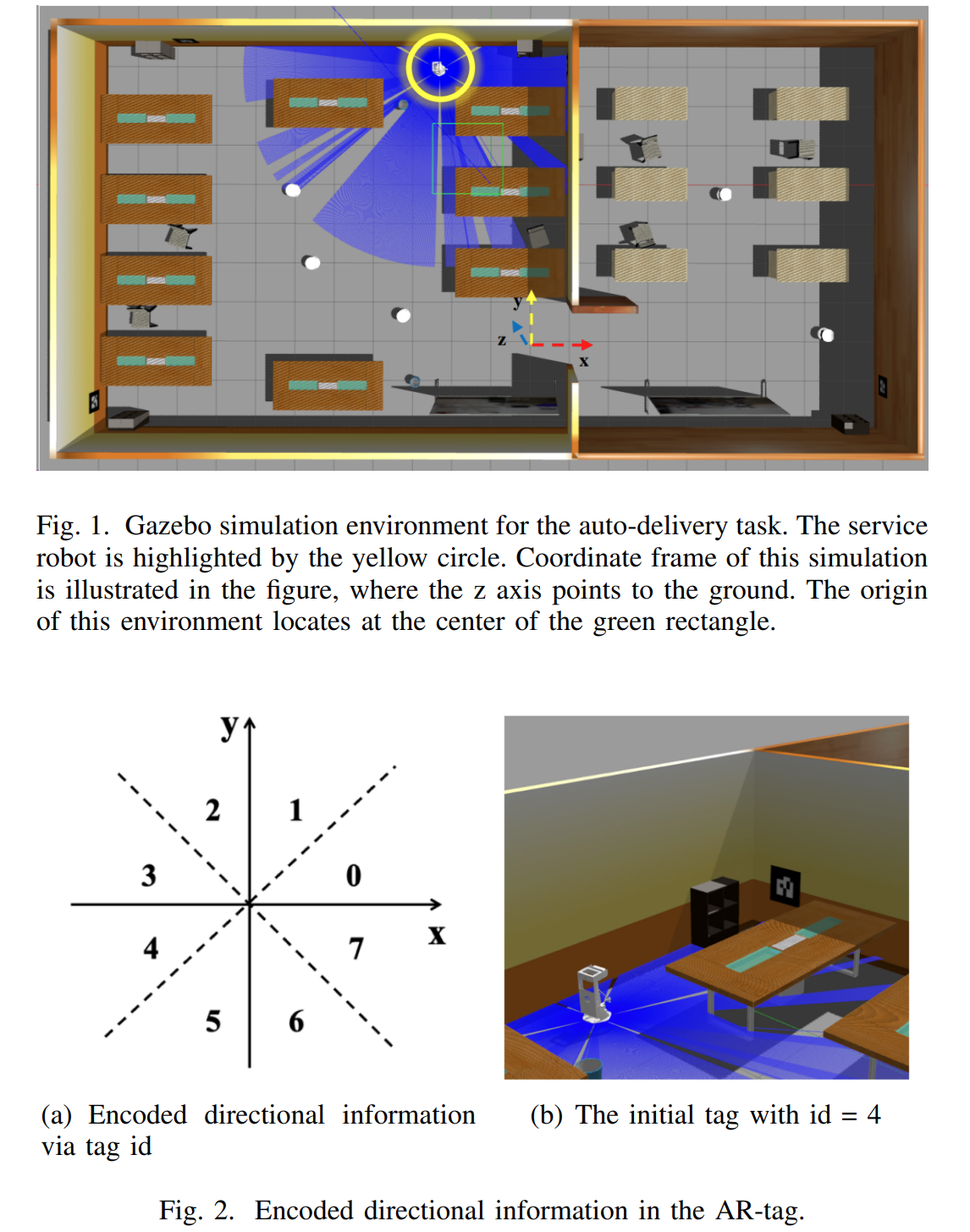
This project was a course project of ECE4310 Programming for Robotics, Spring 2022, at CUHK-Shenzhen. In this project, I programmed a service robot to perform an auto-delivery task in the Gazebo simulator. The robot is required to traverse all delivery stations in a room while avoiding obstacles. Each station is identified by an AR-tag, which also encodes the location of the next station relative to the current station, as described in the following figure.
Method
I implemented the robot’s navigation algorithm based on the ROS Navigation Stack. I used vision data to implement global path planning and LiDAR data to implement local path planning and obstacle avoidance.
For more info
You may check the project report for more technical details.
Demonstration
Here is a video demo of this project.